Enciklopedični YouTube
1 / 1
✪ Vektorska norma. 4. del
Podnapisi
Opredelitev
Naj bo K glavno polje (običajno K = R oz K = C ) in je linearni prostor vseh matrik z m vrsticami in n stolpci, sestavljenih iz elementov K . Norma je podana na prostoru matrik, če je vsaka matrika povezana z nenegativnim realnim številom ‖ A ‖ (\displaystyle \|A\|), imenoval svojo normo, tako da
V primeru kvadratnih matrik (tj. m = n), matrike je mogoče množiti, ne da bi zapustili prostor, zato norme v teh prostorih običajno izpolnjujejo tudi lastnost submultiplikativnost :
Submultiplikativnost lahko izvedemo tudi za norme nekvadratnih matrik, vendar definirane za več zahtevanih velikosti hkrati. Namreč, če je A matrika ℓ × m, in B je matrika m × n, potem A B- matrika ℓ × n .
Norme operaterja
Pomemben razred matričnih norm so operaterske norme, imenovan tudi kot podrejeni oz povzročeno . Operatorska norma je edinstveno konstruirana v skladu z dvema normama, definiranima v in , na podlagi dejstva, da katera koli matrika m × n je predstavljen z linearnim operatorjem iz K n (\displaystyle K^(n)) v K m (\displaystyle K^(m)). Natančneje,
‖ A ‖ = sup ( ‖ A x ‖ : x ∈ K n , ‖ x ‖ = 1 ) = sup ( ‖ A x ‖ ‖ x ‖ : x ∈ K n, x ≠ 0 ). (\displaystyle (\begin(aligned)\|A\|&=\sup\(\|Ax\|:x\in K^(n),\ \|x\|=1\)\\&=\ sup \left\((\frac (\|Ax\|)(\|x\|)):x\in K^(n),\ x\neq 0\desno\).\end(poravnano)))Pod pogojem, da so norme na vektorskih prostorih dosledno določene, je takšna norma submultiplikativna (glej ).
Primeri operaterskih norm
Lastnosti spektralne norme:
- Spektralna norma operatorja je enaka največji singularni vrednosti tega operatorja.
- Spektralna norma normalnega operatorja je enaka absolutni vrednosti največje modulo lastne vrednosti tega operatorja.
- Spektralna norma se ne spremeni, ko se matrika pomnoži z ortogonalno (enotno) matriko.
Neoperatorske norme matrik
Obstajajo matrične norme, ki niso norme operaterja. Koncept neoperatorskih norm matrik je uvedel Yu I. Lyubich in preučeval G. R. Belitsky.
Primer neoperaterske norme
Na primer, upoštevajte dve različni normi operaterja ‖ A ‖ 1 (\displaystyle \|A\|_(1)) in ‖ A ‖ 2 (\displaystyle \|A\|_(2)), kot so norme vrstic in stolpcev. Oblikovanje nove norme ‖ A ‖ = m a x (‖ A ‖ 1 , ‖ A ‖ 2) (\displaystyle \|A\|=max(\|A\|_(1),\|A\|_(2))). Nova norma ima obročasto lastnost ‖ A B ‖ ≤ ‖ A ‖ ‖ B ‖ (\displaystyle \|AB\|\leq \|A\|\|B\|), ohrani enoto ‖ I ‖ = 1 (\displaystyle \|I\|=1) in ni operater.
Primeri norm
Vektor p (\displaystyle p)- norma
Lahko se upošteva m × n (\displaystyle m\krat n) matriko kot vektor velikosti m n (\displaystyle mn) in uporabi standardne vektorske norme:
‖ A ‖ p = ‖ v e c (A) ‖ p = (∑ i = 1 m ∑ j = 1 n | a i j | p) 1 / p (\displaystyle \|A\|_(p)=\|\mathrm ( vec) (A)\|_(p)=\levo(\vsota _(i=1)^(m)\vsota _(j=1)^(n)|a_(ij)|^(p)\ desno)^(1/p))Frobeniusova norma
Frobeniusova norma, oz evklidska norma je poseben primer p-norme za str = 2 : ‖ A ‖ F = ∑ i = 1 m ∑ j = 1 n a i j 2 (\displaystyle \|A\|_(F)=(\sqrt (\sum _(i=1)^(m)\sum _(j =1)^(n)a_(ij)^(2)))).
Frobeniusovo normo je enostavno izračunati (v primerjavi z npr. spektralno normo). Ima naslednje lastnosti:
‖ A x ‖ 2 2 = ∑ i = 1 m | ∑ j = 1 n a i j x j | 2 ≤ ∑ i = 1 m (∑ j = 1 n | a i j | 2 ∑ j = 1 n | x j | 2) = ∑ j = 1 n | x j | 2 ‖ A ‖ F 2 = ‖ A ‖ F 2 ‖ x ‖ 2 2 . (\displaystyle \|Ax\|_(2)^(2)=\vsota _(i=1)^(m)\levo|\vsota _(j=1)^(n)a_(ij)x_( j)\desno|^(2)\leq \vsota _(i=1)^(m)\levo(\vsota _(j=1)^(n)|a_(ij)|^(2)\vsota _(j=1)^(n)|x_(j)|^(2)\desno)=\vsota _(j=1)^(n)|x_(j)|^(2)\|A\ |_(F)^(2)=\|A\|_(F)^(2)\|x\|_(2)^(2).)- Submultiplikativnost: ‖ A B ‖ F ≤ ‖ A ‖ F ‖ B ‖ F (\displaystyle \|AB\|_(F)\leq \|A\|_(F)\|B\|_(F)), Ker ‖ A B ‖ F 2 = ∑ i, j | ∑ k a i k b k j | 2 ≤ ∑ i , j (∑ k | a i k | | b k j |) 2 ≤ ∑ i , j (∑ k | a i k | 2 ∑ k | b k j | 2) = ∑ i , k | a i k | 2 ∑ k , j | b k j | 2 = ‖ A ‖ F 2 ‖ B ‖ F 2 (\displaystyle \|AB\|_(F)^(2)=\sum _(i,j)\left|\sum _(k)a_(ik) b_(kj)\desno|^(2)\leq \vsota _(i,j)\levo(\vsota _(k)|a_(ik)||b_(kj)|\desno)^(2)\ leq \sum _(i,j)\levo(\sum _(k)|a_(ik)|^(2)\sum _(k)|b_(kj)|^(2)\desno)=\sum _(i,k)|a_(ik)|^(2)\vsota _(k,j)|b_(kj)|^(2)=\|A\|_(F)^(2)\| B\|_(F)^(2)).
- ‖ A ‖ F 2 = t r A ∗ A = t r A A ∗ (\displaystyle \|A\|_(F)^(2)=\mathop (\rm (tr)) A^(*)A=\ mathop (\rm (tr)) AA^(*)), kje t r A (\displaystyle \mathop (\rm (tr)) A)- matrična sled A (\displaystyle A), A ∗ (\displaystyle A^(*)) je hermitska konjugirana matrika.
- ‖ A ‖ F 2 = ρ 1 2 + ρ 2 2 + ⋯ + ρ n 2 (\displaystyle \|A\|_(F)^(2)=\rho _(1)^(2)+\rho _ (2)^(2)+\pike +\rho _(n)^(2)), kje ρ 1 , ρ 2 , … , ρ n (\displaystyle \rho _(1),\rho _(2),\pike ,\rho _(n))- singularne vrednosti matrike A (\displaystyle A).
- ‖ A ‖ F (\displaystyle \|A\|_(F)) se pri množenju matrike ne spremeni A (\displaystyle A) levo ali desno na ortogonalne (unitarne) matrike.
Modul največ
Norma največjega modula je še en poseben primer p-norme za str = ∞ .
‖ A ‖ max = max ( | a i j | ) . (\displaystyle \|A\|_(\text(max))=\max\(|a_(ij)|\).)Norm Shatten
Konsistentnost matričnih in vektorskih norm
Matrična norma ‖ ⋅ ‖ a b (\displaystyle \|\cdot \|_(ab)) na K m × n (\displaystyle K^(m\krat n)) klical dogovorjeno z normami ‖ ⋅ ‖ a (\displaystyle \|\cdot \|_(a)) na K n (\displaystyle K^(n)) in ‖ ⋅ ‖ b (\displaystyle \|\cdot \|_(b)) na K m (\displaystyle K^(m)), če:
‖ A x ‖ b ≤ ‖ A ‖ a b ‖ x ‖ a (\displaystyle \|Ax\|_(b)\leq \|A\|_(ab)\|x\|_(a))za katero koli A ∈ K m × n, x ∈ K n (\displaystyle A\in K^(m\krat n),x\in K^(n)). Po konstrukciji je operatorska norma skladna z izvirno vektorsko normo.
Primeri doslednih, a ne podrejenih matričnih norm:
Enakovrednost norm
Vse norme v prostoru K m × n (\displaystyle K^(m\krat n)) enakovredni, to je za kateri koli dve normi ‖ . α (\displaystyle \|.\|_(\alpha )) in ‖ . ‖ β (\displaystyle \|.\|_(\beta )) in za katero koli matriko A ∈ K m × n (\displaystyle A\v K^(m\krat n)) dvojna neenakost velja.
» Lekcija 12. Matrični rang. Izračun matričnega ranga. Matrična norma
Lekcija številka 12. Matrični rang. Izračun matričnega ranga. Matrična norma.
Če vse matrične manjšeAnaročilokenaki nič, potem so tudi vsi minori reda k + 1, če taki obstajajo, enaki nič.
Matrični rang A
je največji red minorov matrike A
, razen nič.
Največji rang je lahko enak najmanjšemu številu vrstic ali stolpcev matrike, tj. če ima matrika velikost 4x5, bo največji rang 4.
Najmanjši rang matrike je 1, razen če imate opravka z ničelno matriko, kjer je rang vedno nič.
Rang nedegenerirane kvadratne matrike reda n je enak n, ker je njena determinanta manjša matrika reda n in je nedegenerirana matrika različna od nič.
Transponiranje matrike ne spremeni njenega ranga.
Naj bo rang matrike . Nato se pokliče kateri koli minor reda , razen nič osnovni minor.
Primer. Glede na matriko A. 
Matrična determinanta je nič.
Minor drugega reda ![]() . Zato je r(A)=2 in minor je bazičen.
. Zato je r(A)=2 in minor je bazičen.
Osnovni minor je tudi minor ![]() .
.
Minor ![]() , Ker =0, torej ne bo osnovno.
, Ker =0, torej ne bo osnovno.
telovadba: samostojno preveri, kateri drugi minori drugega reda bodo osnovni in kateri ne.
Iskanje ranga matrike z izračunom vseh njenih pomolnikov zahteva preveč računskega dela. (Bralec lahko preveri, da je v kvadratni matriki četrtega reda 36 minorjev drugega reda.) Zato se za iskanje ranga uporabi drugačen algoritem. Za opis je potrebnih nekaj dodatnih informacij.
Naslednje operacije na njih imenujemo elementarne transformacije matrik:
1) permutacija vrstic ali stolpcev;
2) množenje vrstice ali stolpca z neničelnim številom;
3) dodajanje druge vrstice v eno od vrstic, pomnoženo s številom, ali dodajanje enemu od stolpcev drugega stolpca, pomnoženega s številom.
Pri elementarnih transformacijah se rang matrike ne spremeni.
Algoritem za izračun ranga matrike je podoben algoritmu za izračun determinante in je v tem, da se s pomočjo elementarnih transformacij matrika reducira na preprosto obliko, za katero ni težko najti ranga. Ker se rang z vsako transformacijo ni spremenil, z izračunom ranga transformirane matrike tako poiščemo rang prvotne matrike.
Naj bo treba izračunati rang matrike dimenzij mxn.
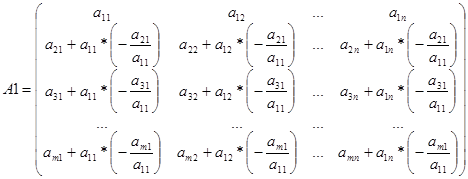
Kot rezultat izračunov ima matrika A1 obliko 

Če so vse vrstice, začenši s tretjo, enake nič, potem ![]() , od mladoletne
, od mladoletne ![]() . V nasprotnem primeru s permutacijo vrstic in stolpcev s številkami, večjimi od dve, dosežemo, da je tretji element tretje vrstice različen od nič. Nadalje, z dodajanjem tretje vrstice, pomnožene z ustreznimi številkami, v vrstice z velikimi številkami, dobimo ničle v tretjem stolpcu, začenši s četrtim elementom itd.
. V nasprotnem primeru s permutacijo vrstic in stolpcev s številkami, večjimi od dve, dosežemo, da je tretji element tretje vrstice različen od nič. Nadalje, z dodajanjem tretje vrstice, pomnožene z ustreznimi številkami, v vrstice z velikimi številkami, dobimo ničle v tretjem stolpcu, začenši s četrtim elementom itd.
Na neki stopnji bomo prišli do matrike, v kateri so vse vrstice, začenši od (r + 1) th, enake nič (ali odsotne pri ), minor v prvih vrsticah in prvih stolpcih pa je determinanta trikotnika matrika z neničelnimi elementi na diagonali . Rang takšne matrike je. Zato je Rang(A)=r.
V predlaganem algoritmu za iskanje ranga matrike morajo biti vsi izračuni izvedeni brez zaokroževanja. Poljubno majhna sprememba vsaj enega od elementov vmesnih matrik lahko privede do dejstva, da se bo dobljeni odgovor razlikoval od ranga prvotne matrike za več enot.
Če so bili elementi v prvotni matriki cela števila, je primerno izvesti izračune brez uporabe ulomkov. Zato je na vsaki stopnji priporočljivo pomnožiti nize s takimi številkami, da se v izračunih ne pojavijo ulomki.
Pri laboratorijskem in praktičnem delu bomo obravnavali primer iskanja ranga matrike.
ALGORITEM ISKANJA MATRIČNI PREDPISI
.
Obstajajo samo tri norme matrice.
Prva matrična norma= največje število števil, dobljenih s seštevanjem vseh elementov vsakega stolpca, vzeto po modulu.
Primer: naj bo podana 3x2 matrika A (slika 10). Prvi stolpec vsebuje elemente: 8, 3, 8. Vsi elementi so pozitivni. Poiščimo njihovo vsoto: 8+3+8=19. Drugi stolpec vsebuje elemente: 8, -2, -8. Dva elementa sta negativna, zato je treba pri seštevanju teh števil zamenjati modul teh števil (to je brez znakov minus). Poiščimo njihovo vsoto: 8+2+8=18. Največ teh dveh številk je 19. Torej je prva norma matrike 19.

Slika 10.
Druga matrična norma je kvadratni koren vsote kvadratov vseh elementov matrike. In to pomeni, da kvadriramo vse elemente matrike, nato dodamo dobljene vrednosti in iz rezultata izvlečemo kvadratni koren.
V našem primeru se je izkazalo, da je norma 2 matrike enaka kvadratnemu korenu iz 269. V diagramu sem približno vzel kvadratni koren iz 269 in rezultat je bil približno 16,401. Čeprav je pravilneje ne izvleči korenine. 
Tretja matrika norm je največje število števil, dobljenih s seštevanjem vseh elementov vsake vrstice, vzeto po modulu.
V našem primeru: prva vrstica vsebuje elemente: 8, 8. Vsi elementi so pozitivni. Poiščimo njihovo vsoto: 8+8=16. Druga vrstica vsebuje elemente: 3, -2. Eden od elementov je negativen, zato morate pri seštevanju teh števil nadomestiti modul tega števila. Poiščimo njihovo vsoto: 3+2=5. Tretja vrstica vsebuje elemente 8 in -8. Eden od elementov je negativen, zato morate pri seštevanju teh števil nadomestiti modul tega števila. Poiščimo njihovo vsoto: 8+8=16. Največ teh treh števil je 16. Torej je tretja norma matrike 16. 
Sestavil: Saliy N.A.
Matrična norma realno število, pripisano tej matriki, imenujemo ||A|| tako, da je kot realno število dodeljeno vsaki matriki iz n-dimenzionalnega prostora in zadošča 4 aksiomom:
1. ||A||³0 in ||A||=0 le, če je A ničelna matrika;
2. ||αA||=|α|·||A||, kjer je R;
3. ||A+B||£||A||+||B||;
4. ||A·B||£||A||·||B||. (lastnost multiplikativnosti)
Matrično normo lahko vnesete na različne načine. Matriko A si lahko ogledate kot n 2 - dimenzionalni vektor.
Ta norma se imenuje evklidska norma matrike.
Če za poljubno kvadratno matriko A in poljubni vektor x, katerega dimenzija je enaka vrstnemu redu matrike, velja neenakost ||Ax||£||A||·||x||
potem pravimo, da je norma matrike A konsistentna z normo vektorja. Upoštevajte, da je norma vektorja v zadnjem pogoju na levi (Ax je vektor).
Različne matrične norme so skladne z dano vektorsko normo. Izberimo najmanjšega med njimi. Takšna bo
Ta matrična norma je podrejena dani vektorski normi. Obstoj maksimuma v tem izrazu izhaja iz kontinuitete norme, saj vedno obstaja vektor x -> ||x||=1 in ||Ax||=||A||.
Pokažimo, da xpotem norma N(A) ni predmet nobene vektorske norme. Matrične norme, podrejene predhodno uvedenim vektorskim normam, so izražene kot sledi:
1. ||A|| ¥ = |a ij | (norma-največ)
2. ||A|| 1 = |a ij | (normativ)
3. ||A|| 2 = , (spektralna norma)
kjer je s 1 največja lastna vrednost simetrične matrike A¢A, ki je produkt transponirane in originalne matrike. Če je matrika A¢A simetrična, potem so vse njene lastne vrednosti realne in pozitivne. Število l je lastna vrednost, neničelni vektor x pa je lastni vektor matrike A (če sta povezana z relacijo Ax=lx). Če je matrika A sama simetrična, je A¢ = A, potem je A¢A = A 2 in nato s 1 = , kjer je lastna vrednost matrike A z največjo absolutno vrednostjo, zato imamo v tem primeru = .
Lastne vrednosti matrike ne presegajo nobene od dogovorjenih norm. Z normalizacijo relacije, ki določa lastne vrednosti, dobimo ||λx||=|||Ax||, |λ|·||x||=||Ax||£||A||·||x||, | λ | £||A||
Ker ||A|| 2 £||A|| e , kjer lahko evklidsko normo enostavno izračunamo, namesto spektralne norme lahko v ocenah uporabimo evklidsko normo matrike.
30. Pogojenost sistemov enačb. Faktor kondicioniranja .
Stopnja pogojenosti- vpliv odločitve na izhodiščne podatke. sekira = b: vektor b ustreza odločbi x. Pustiti b se bo spremenilo do . Nato vektor b+ bo ustrezal novi rešitvi x+ : A(x+ ) = b+. Ker je sistem linearen, torej Sekira+A = b+, potem A = ; = ; = ; b = Ax; = potem ; * , kjer je relativna napaka motnje rešitve, – pogojevalni faktorkond(A) (kolikokrat se lahko poveča napaka rešitve), je relativna motnja vektorja b. kond(A) = ; kond(A)* Lastnosti koeficienta: odvisno od izbire matrične norme; cond( = cond(A); množenje matrike s številom ne vpliva na faktor pogoja. Večji ko je koeficient, močnejša napaka v začetnih podatkih vpliva na rešitev SLAE. Številka pogoja ne sme biti manjša od 1.
31. Metoda pometanja za reševanje sistemov linearnih algebrskih enačb.
Pogosto je treba rešiti sisteme, katerih matrike so šibko zapolnjene, tj. ki vsebuje veliko neničelnih elementov. Matrike takšnih sistemov imajo običajno določeno strukturo, med katerimi so sistemi z matricami pasovne strukture, tj. v njih se neničelni elementi nahajajo na glavni diagonali in na več sekundarnih diagonalah. Za reševanje sistemov s pasovnimi matrikami lahko Gaussovo metodo pretvorimo v bolj učinkovite metode. Oglejmo si najpreprostejši primer tračnih sistemov, na katere, kot bomo videli kasneje, je rešitev diskretizacijskih problemov za mejne probleme za diferencialne enačbe reducirana z metodami končnih razlik, končnih elementov itd. Tridiagonalna matrika je taka matrika, ki ima neničelne elemente samo na glavni diagonali in ob njej:
Tri diagonalna matrika neničelnih elementov ima skupaj (3n-2).
Preimenujte koeficiente matrike:
Nato lahko v zapisu po komponentah sistem predstavimo kot:
A i * x i-1 + b i * x i + c i * x i+1 = d i , i=1, 2,…, n; (7)
a 1 =0, c n =0. (osem)
Struktura sistema predvideva razmerje le med sosednjimi neznankami:
x i \u003d x i * x i +1 + h i (9)
x i -1 =x i -1* x i + h i -1 in nadomestimo v (7):
A i (x i-1* x i + h i-1)+ b i * x i + c i * x i+1 = d i
(a i * x i-1 + b i)x i = –c i * x i+1 +d i –a i * h i-1
Če primerjamo dobljeni izraz s predstavitvijo (7), dobimo:
Formule (10) predstavljajo rekurzivne relacije za izračun koeficientov pomika. Zahtevajo določitev začetnih vrednosti. V skladu s prvim pogojem (8) za i =1 imamo 1 =0, kar pomeni
Nadalje se preostali koeficienti pomika izračunajo in shranijo po formulah (10) za i=2,3,…, n, za i=n pa ob upoštevanju drugega pogoja (8) dobimo x n =0 . Zato je v skladu s formulo (9) x n = h n .
Nato se po formuli (9) zaporedno najdejo neznanke x n -1 , x n -2 , …, x 1 . Ta stopnja izračuna se imenuje obratna vožnja, medtem ko se izračun koeficientov premika imenuje premik naprej.
Za uspešno uporabo metode pometanja je potrebno, da v procesu izračunov ni situacij z deljenjem z ničlo, pri veliki dimenzionalnosti sistemov pa ne sme biti hitrega povečanja napak zaokroževanja. Poklicali bomo tek pravilno, če imenovalec koeficientov premetavanja (10) ne izgine in trajnostno, če je ½x i ½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Izrek. Naj bosta koeficienta a i in c i enačbe (7) za i=2,3,..., n-1 različna od nič in naj bo
½b i ½>½a i ½+½c i ½ za i=1, 2,..., n. (enajst)
Potem je pomet, definiran s formulama (10), (9), pravilen in stabilen.


