YouTube enciclopedic
1 / 1
✪ Norma vectorială. Partea 4.
Subtitrări
Definiție
Fie K câmpul principal (de obicei K = R sau K = C ) și este spațiul liniar al tuturor matricelor cu m rânduri și n coloane formate din elemente K. O normă este dată pe spațiul matricelor dacă fiecare matrice este asociată cu un număr real nenegativ ‖ A ‖ (\displaystyle \|A\|), numit normă, astfel încât
În cazul matricelor pătrate (adică m = n), matricele pot fi multiplicate fără a părăsi spațiul și, prin urmare, normele din aceste spații satisfac de obicei și proprietatea submultiplicativitatea :
Submultiplicativitatea poate fi îndeplinită și pentru normele matricelor nepătrate, dar definite pentru mai multe dimensiuni necesare simultan. Și anume, dacă A este o matrice ℓ × m, iar B este matricea m × n, Acea A B- matrice ℓ × n .
Normele operatorilor
O clasă importantă de norme matriceale sunt standardele operatorului, numit si subordonatii sau induse . Norma operatorului este construită în mod unic folosind două norme definite în și , pe baza faptului că orice matrice m × n reprezentat de un operator liniar din K n (\displaystyle K^(n)) V K m (\displaystyle K^(m)). Specific,
‖ A ‖ = sup ( ‖ A x ‖ : x ∈ K n , ‖ x ‖ = 1 ) = sup ( ‖ A x ‖ ‖ x ‖ : x ∈ K n , x ≠ 0 ) . (\displaystyle (\begin(aligned)\|A\|&=\sup\(\|Ax\|:x\în K^(n),),\ \|x\|=1\)\\&=\ sup \left\((\frac (\|Ax\|)(\|x\|)):x\in K^(n),\ x\neq 0\right\).\end(aliniat)))Cu condiția ca normele să fie specificate în mod consecvent pe spațiile vectoriale, o astfel de normă este submultiplicativă (vezi).
Exemple de norme pentru operatori
Proprietățile normei spectrale:
- Norma spectrală a unui operator este egală cu valoarea maximă singulară a acestui operator.
- Norma spectrală a unui operator normal este egală cu valoarea absolută a valorii proprii modulo maxime a acestui operator.
- Norma spectrală nu se schimbă atunci când matricea este înmulțită cu o matrice ortogonală (unitară).
Norme non-operatoare ale matricelor
Există norme matrice care nu sunt norme de operator. Conceptul de norme non-operatoare ale matricelor a fost introdus de Yu. I. Lyubich și studiat de G. R. Belitsky.
Exemplu de normă non-operator
De exemplu, luați în considerare două norme de operator diferite ‖ A ‖ 1 (\displaystyle \|A\|_(1))Și ‖ A ‖ 2 (\displaystyle \|A\|_(2)), de exemplu norme de rând și coloană. Să creăm o nouă normă ‖ A ‖ = m a x (‖ A ‖ 1 , ‖ A ‖ 2) (\displaystyle \|A\|=max(\|A\|_(1),\|A\|_(2))). Noua normă are o proprietate circulară ‖ A B ‖ ≤ ‖ A ‖ ‖ B ‖ (\displaystyle \|AB\|\leq \|A\|\|B\|), păstrează unitatea ‖ I ‖ = 1 (\displaystyle \|I\|=1)și nu este operator.
Exemple de standarde
Vector p (\displaystyle p)-normă
Poate fi considerat m × n (\displaystyle m\times n) matricea ca vector de dimensiune m n (\displaystyle mn)și folosiți norme vectoriale standard:
‖ A ‖ p = ‖ v e c (A) ‖ p = (∑ i = 1 m ∑ j = 1 n | a i j | p) 1 / p (\displaystyle \|A\|_(p)=\|\mathrm ( vec) (A)\|_(p)=\left(\sum _(i=1)^(m)\sum _(j=1)^(n)|a_(ij)|^(p)\ dreapta)^(1/p))Norma Frobenius
Norma Frobenius, sau norma euclidiană reprezintă un caz special al normei p pt p = 2 : ‖ A ‖ F = ∑ i = 1 m ∑ j = 1 n a i j 2 (\displaystyle \|A\|_(F)=(\sqrt (\sum _(i=1))^(m)\sum _(j =1)^(n)a_(ij)^(2)))).
Norma Frobenius este ușor de calculat (comparativ, de exemplu, cu norma spectrală). Are următoarele proprietăți:
‖ A x ‖ 2 2 = ∑ i = 1 m | ∑ j = 1 n a i j x j | 2 ≤ ∑ i = 1 m (∑ j = 1 n | a i j | 2 ∑ j = 1 n | x j | 2) = ∑ j = 1 n | x j | 2 ‖ A ‖ F 2 = ‖ A ‖ F 2 ‖ x ‖ 2 2 . (\displaystyle \|Ax\|_(2)^(2)=\sum _(i=1)^(m)\left|\sum _(j=1)^(n)a_(ij)x_( j)\right|^(2)\leq \sum _(i=1)^(m)\left(\sum _(j=1)^(n)|a_(ij)|^(2)\sum _(j=1)^(n)|x_(j)|^(2)\right)=\sum _(j=1)^(n)|x_(j)|^(2)\|A\ |_(F)^(2)=\|A\|_(F)^(2)\|x\|_(2)^(2).)- Submultiplicativitatea: ‖ A B ‖ F ≤ ‖ A ‖ F ‖ B ‖ F (\displaystyle \|AB\|_(F)\leq \|A\|_(F)\|B\|_(F)), deoarece ‖ A B ‖ F 2 = ∑ i , j | ∑ k a i k b k j | 2 ≤ ∑ i , j (∑ k | a i k | | b k j |) 2 ≤ ∑ i , j (∑ k | a i k | 2 ∑ k | b k j | 2) = ∑ i , k | a i k | 2 ∑ k , j | b k j | 2 = ‖ A ‖ F 2 ‖ B ‖ F 2 (\displaystyle \|AB\|_(F)^(2)=\sum _(i,j)\left|\sum _(k)a_(ik) b_(kj)\right|^(2)\leq \sum _(i,j)\left(\sum _(k)|a_(ik)||b_(kj)|\right)^(2)\ leq \sum _(i,j)\left(\sum _(k)|a_(ik)|^(2)\sum _(k)|b_(kj)|^(2)\right)=\sum _(i,k)|a_(ik)|^(2)\sum _(k,j)|b_(kj)|^(2)=\|A\|_(F)^(2)\| B\|_(F)^(2)).
- ‖ A ‖ F 2 = t r A ∗ A = t r A A ∗ (\displaystyle \|A\|_(F)^(2)=\mathop (\rm (tr)) A^(*)A=\ mathop (\rm (tr)) AA^(*)), Unde t r A (\displaystyle \mathop (\rm (tr)) A)- urma matricei A (\displaystyle A), A ∗ (\displaystyle A^(*))- Matrice conjugată hermitiană.
- ‖ A ‖ F 2 = ρ 1 2 + ρ 2 2 + ⋯ + ρ n 2 (\displaystyle \|A\|_(F)^(2)=\rho _(1)^(2)+\rho _ (2)^(2)+\dots +\rho _(n)^(2)), Unde ρ 1 , ρ 2 , … , ρ n (\displaystyle \rho _(1),\rho _(2),\dots,\rho _(n))- numere singulare ale matricei A (\displaystyle A).
- ‖ A ‖ F (\displaystyle \|A\|_(F)) nu se schimbă atunci când matricea este înmulțită A (\displaystyle A) stânga sau dreapta în matrici ortogonale (unitare).
Modul maxim
Norma de modul maxim este un alt caz special al normei p pt p = ∞ .
‖ A ‖ max = max ( | a i j | ) . (\displaystyle \|A\|_(\text(max))=\max\(|a_(ij)|\).)Norma Schatten
Consecvența normelor matriceale și vectoriale
Norma matricei ‖ ⋅ ‖ a b (\displaystyle \|\cdot \|_(ab)) pe K m × n (\displaystyle K^(m\times n)) numit ne-am înțeles asupra cu standarde ‖ ⋅ ‖ a (\displaystyle \|\cdot \|_(a)) pe K n (\displaystyle K^(n))Și ‖ ⋅ ‖ b (\displaystyle \|\cdot \|_(b)) pe K m (\displaystyle K^(m)), Dacă:
‖ A x ‖ b ≤ ‖ A ‖ a b ‖ x ‖ a (\displaystyle \|Ax\|_(b)\leq \|A\|_(ab)\|x\|_(a))pentru orice A ∈ K m × n , x ∈ K n (\displaystyle A\in K^(m\times n),x\in K^(n)). Norma operatorului prin construcție este în concordanță cu norma vectorială originală.
Exemple de norme de matrice coordonate, dar nu subordonate:
Echivalența standardelor
Toate normele în spațiu K m × n (\displaystyle K^(m\times n)) echivalent, adică pentru oricare două norme ‖ . ‖ α (\displaystyle \|.\|_(\alpha ))Și ‖ . ‖ β (\displaystyle \|.\|_(\beta )) si pentru orice matrice A ∈ K m × n (\displaystyle A\in K^(m\times n)) inegalitatea dublă este adevărată.
» Lecția 12. Rangul matricei. Calcularea rangului unei matrice. Norma matricelor
Lecția #12. Rangul matricei. Calcularea rangului unei matrice. Norma matricelor.
Dacă toţi minorii matriceiAOrdinksunt egale cu zero, atunci toți minorii de ordinul k+1, dacă există, sunt de asemenea egali cu zero.
Rangul matricei A
se numește cel mai mare dintre ordinele minore ale matricei A
, diferit de zero.
Rangul maxim poate fi egal cu numărul minim al numărului de rânduri sau coloane ale matricei, i.e. dacă matricea are o dimensiune de 4x5, atunci rangul maxim va fi 4.
Rangul minim al unei matrice este 1, cu excepția cazului în care aveți de-a face cu o matrice nulă, unde rangul este întotdeauna zero.
Rangul unei matrice pătrate nesingulare de ordinul n este egal cu n, deoarece determinantul său este minor de ordinul n și este diferit de zero pentru o matrice nesingulară.
Când o matrice este transpusă, rangul ei nu se schimbă.
Fie rangul matricei . Apoi, orice minor de ordin, diferit de zero, este numit minor de bază.
Exemplu. Matricea A este dată. 
Determinantul matricei este zero.
Minor de ordinul doi ![]() . Prin urmare, r(A)=2 și minorul este de bază.
. Prin urmare, r(A)=2 și minorul este de bază.
Minorul de bază este și minorul ![]() .
.
Minor ![]() , deoarece =0, deci nu va fi de bază.
, deoarece =0, deci nu va fi de bază.
Exercițiu: verificați independent care alți minori de ordinul doi vor fi de bază și care nu.
Găsirea rangului unei matrice prin calcularea tuturor minorilor ei necesită prea multă muncă de calcul. (Cititorul poate verifica dacă există 36 de minori de ordinul doi într-o matrice pătrată de ordinul al patrulea.) Prin urmare, se folosește un alt algoritm pentru a găsi rangul. Pentru a-l descrie, vor fi necesare o serie de informații suplimentare.
Să numim următoarele acțiuni asupra lor transformări elementare ale matricelor:
1) rearanjarea rândurilor sau coloanelor;
2) înmulțirea unui rând sau a unei coloane cu un alt număr decât zero;
3) adăugarea la unul dintre rânduri a unui alt rând înmulțit cu un număr sau adăugarea la una dintre coloane a unei alte coloane înmulțite cu un număr.
În timpul transformărilor elementare, rangul matricei nu se modifică.
Algoritm pentru calcularea rangului unei matrice este similar cu algoritmul de calcul al determinantului și constă în faptul că, folosind transformări elementare, matricea este redusă la o formă simplă pentru care nu este greu de găsit rangul. Deoarece rangul nu s-a schimbat în timpul fiecărei transformări, calculând rangul matricei transformate, găsim astfel rangul matricei originale.
Să presupunem că trebuie să calculăm rangul unei matrice de dimensiuni mXn.
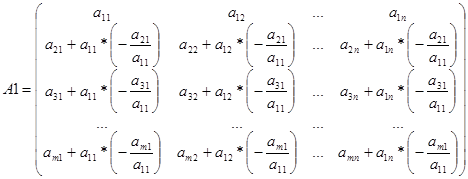
Ca rezultat al calculelor, matricea A1 are forma 

Dacă toate liniile care încep de la a treia sunt zero, atunci ![]() , de la minor
, de la minor ![]() . În caz contrar, prin rearanjarea rândurilor și coloanelor cu numere mai mari de două, ne asigurăm că al treilea element al celui de-al treilea rând este diferit de zero. În continuare, adunând al treilea rând, înmulțit cu numerele corespunzătoare, la rândurile cu numere mai mari, obținem zerouri în a treia coloană, începând de la al patrulea element etc.
. În caz contrar, prin rearanjarea rândurilor și coloanelor cu numere mai mari de două, ne asigurăm că al treilea element al celui de-al treilea rând este diferit de zero. În continuare, adunând al treilea rând, înmulțit cu numerele corespunzătoare, la rândurile cu numere mai mari, obținem zerouri în a treia coloană, începând de la al patrulea element etc.
La un moment dat vom ajunge la o matrice în care toate rândurile, începând de la (r+1)-lea, sunt egale cu zero (sau absent pentru ), iar minorul din primele rânduri și primele coloane este determinantul unui triunghiular. matrice cu elemente nenule pe diagonală . Rangul unei astfel de matrice este egal cu . Prin urmare, Rang(A)=r.
În algoritmul propus pentru găsirea rangului unei matrice, toate calculele trebuie efectuate fără rotunjire. O modificare arbitrar de mică în cel puțin unul dintre elementele matricelor intermediare poate duce la faptul că răspunsul rezultat va diferi de rangul matricei inițiale cu mai multe unități.
Dacă elementele din matricea originală erau numere întregi, atunci este convenabil să efectuați calcule fără a utiliza fracții. Prin urmare, în fiecare etapă, este recomandabil să înmulțiți liniile cu astfel de numere, astfel încât fracțiile să nu apară în timpul calculelor.
În lucrările de laborator și practice, vom lua în considerare un exemplu de găsire a rangului unei matrice.
ALGORITMUL DE GĂSIRE STANDARDE MATRICE
.
Există doar trei norme ale matricei.
Prima normă a unei matrice= maximul numerelor obținute prin adunarea tuturor elementelor fiecărei coloane, luate modulo.
Exemplu: să fie dată o matrice A de dimensiunea 3x2 (Fig. 10). Prima coloană conține elementele: 8, 3, 8. Toate elementele sunt pozitive. Să aflăm suma lor: 8+3+8=19. A doua coloană conține elementele: 8, -2, -8. Două elemente sunt negative, prin urmare, atunci când se adună aceste numere, este necesar să se înlocuiască modulul acestor numere (adică, fără semne minus). Să aflăm suma lor: 8+2+8=18. Maximul acestor două numere este 19. Aceasta înseamnă că prima normă a matricei este 19.

Figura 10.
A doua normă a matricei este rădăcina pătrată a sumei pătratelor tuturor elementelor matricei. Aceasta înseamnă că pătram toate elementele matricei, apoi adăugăm valorile rezultate și extragem rădăcina pătrată din rezultat.
În cazul nostru, norma 2 a matricei s-a dovedit a fi egală cu rădăcina pătrată a lui 269. În diagramă, am luat aproximativ rădăcina pătrată a lui 269 și rezultatul a fost aproximativ 16,401. Deși este mai corect să nu extragi rădăcina. 
A treia normă a matricei reprezintă maximul numerelor obţinute prin adunarea tuturor elementelor fiecărui rând, luate modulo.
În exemplul nostru: prima linie conține elementele: 8, 8. Toate elementele sunt pozitive. Să aflăm suma lor: 8+8=16. A doua linie conține elementele: 3, -2. Unul dintre elemente este negativ, așa că atunci când se adună aceste numere, este necesar să se înlocuiască modulul acestui număr. Să aflăm suma lor: 3+2=5. A treia linie conține elementele 8 și -8. Unul dintre elemente este negativ, așa că atunci când se adună aceste numere, este necesar să se înlocuiască modulul acestui număr. Să aflăm suma lor: 8+8=16. Maximul acestor trei numere este 16. Aceasta înseamnă că a treia normă a matricei este 16. 
Alcătuit de: Saliy N.A.
Norma matricei Să numim numărul real alocat acestei matrice ||A|| astfel încât, ca număr real, este asociat cu fiecare matrice din spațiul n-dimensional și satisface 4 axiome:
1. ||A||³0 și ||A||=0, numai dacă A este o matrice zero;
2. ||αA||=|α|·||A||, unde un R;
3. ||A+B||£||A||+||B||;
4. ||A·B||£||A||·||B||. (proprietatea multiplicativității)
Norma matricelor poate fi introdusă în diverse moduri. Matricea A poate fi vizualizată ca n 2 - vector dimensional.
Această normă se numește norma euclidiană a matricei.
Dacă pentru orice matrice pătrată A și orice vector x a cărui dimensiune este egală cu ordinea matricei, inegalitatea ||Ax||£||A||·||x|| este satisfăcută,
atunci spunem că norma matricei A este consecventă cu norma vectorului. Rețineți că în stânga în ultima condiție este norma vectorului (Ax este un vector).
Diverse norme de matrice sunt în concordanță cu o normă vectorială dată. Să-l alegem pe cel mai mic dintre ele. Acesta va fi cazul
Această normă matriceală este subordonată unei anumite norme vectoriale. Existența unui maxim în această expresie decurge din continuitatea normei, întrucât există întotdeauna un vector x -> ||x||=1 și ||Ax||=||A||.
Să arătăm că norma N(A) nu este supusă vreunei norme vectoriale. Normele matriceale, subordonate normelor vectoriale introduse anterior, se exprimă astfel:
1. ||A|| ¥ = |a ij | (normă-maximum)
2. ||A|| 1 = |a ij | (sumă-normă)
3. ||A|| 2 = , (normă spectrală)
unde s 1 este cea mai mare valoare proprie a matricei simetrice A¢A, care este produsul dintre matricele transpuse și originale. Deoarece matricea A¢A este simetrică, atunci toate valorile sale proprii sunt reale și pozitive. Numărul l este o valoare proprie, iar un vector diferit de zero x este un vector propriu al matricei A (dacă sunt legați unul de celălalt prin relația Ax=lx). Dacă însăși matricea A este simetrică, A¢ = A, atunci A¢A = A 2 și apoi s 1 = , unde este cea mai mare valoare proprie absolută a matricei A. În consecință, în acest caz avem = .
Valorile proprii ale unei matrice nu depășesc niciuna dintre normele sale consistente. Normalizând relația care determină valorile proprii, obținem ||λx||=||Ax||, |λ|·||x||=||Ax||£||A||·||x||, |λ| £||A||
Din moment ce ||A|| 2 £||A|| e, unde norma euclidiană este calculată simplu, în estimări, în loc de norma spectrală, puteți folosi norma euclidiană a matricei.
30. Condiționalitatea sistemelor de ecuații. Coeficientul de condiționalitate .
Gradul de condiționare- influenţa deciziei asupra datelor iniţiale. Ax = b: vector b corespunde soluției X. Lăsa b se va schimba după valoare. Apoi vectorul b+ noua soluţie va corespunde x+ : A(x+ ) = b+. Deoarece sistemul este liniar, atunci Ax+A = b+, Apoi A = ; = ; = ; b = Ax; = atunci ; * , unde este eroarea relativă a perturbației soluției, – factor de condiționarecond(A) (de câte ori poate crește eroarea de soluție), – perturbarea relativă a vectorului b. cond(A) = ; cond(A)* Proprietățile coeficientului: depinde de alegerea normei matriceale; cond( = cond(A); înmulțirea unei matrice cu un număr nu afectează coeficientul de condiționare. Cu cât coeficientul este mai mare, cu atât eroarea datelor sursă afectează mai puternic soluția SLAE. Numărul condiției nu poate fi mai mic de 1.
31. Metoda sweep pentru rezolvarea sistemelor de ecuații algebrice liniare.
Adesea este nevoie să se rezolve sisteme ale căror matrice, fiind slab umplute, i.e. conţinând multe elemente diferite de zero. Matricele unor astfel de sisteme au de obicei o anumită structură, printre care se disting sistemele cu matrici cu o structură panglică, adică. în ele, elemente nenule sunt situate pe diagonala principală și pe mai multe diagonale secundare. Pentru rezolvarea sistemelor cu matrice de bandă, metoda Gaussiană poate fi transformată în metode mai eficiente. Să luăm în considerare cel mai simplu caz al sistemelor de bandă, la care, așa cum vom vedea mai târziu, se reduce soluția problemelor de discretizare a problemelor cu valori la limită pentru ecuații diferențiale prin metode de diferențe finite, elemente finite etc. matricea este o matrice în care elementele diferite de zero sunt situate numai pe diagonala principală și adiacente acesteia:
Cele trei matrici diagonale au un total de (3n-2) elemente nenule.
Să redesemnăm coeficienții matricei:
Apoi, în notația componentelor, sistemul poate fi reprezentat astfel:
A i * x i-1 + b i * x i + c i * x i+1 = d i , i=1, 2,…, n; (7)
a 1 =0, c n =0. (8)
Structura sistemului presupune o relație numai între necunoscute învecinate:
x i =x i * x i +1 +h i (9)
x i -1 =x i -1* x i + h i -1 și înlocuiți în (7):
A i (x i-1* x i + h i-1)+ b i * x i + c i * x i+1 = d i
(a i * x i-1 + b i)x i = –c i * x i+1 +d i –a i * h i-1
Comparând expresia rezultată cu reprezentarea (7), obținem:
Formulele (10) reprezintă relații de recurență pentru calcularea coeficienților de baleiaj. Acestea necesită setarea valorilor inițiale. În conformitate cu prima condiție (8) pentru i =1 avem un 1 =0, ceea ce înseamnă
În continuare, coeficienții de rulare rămași sunt calculați și salvați conform formulelor (10) pentru i=2,3,..., n, iar pentru i=n, ținând cont de a doua condiție (8), obținem x n =0. Prin urmare, în conformitate cu formula (9) x n = h n.
După aceea, conform formulei (9), se găsesc succesiv necunoscutele x n -1, x n -2, ..., x 1. Această etapă de calcul se numește cursă înapoi, în timp ce calculul coeficienților de baleiaj se numește cursă înainte.
Pentru aplicarea cu succes a metodei sweep, este necesar ca în timpul calculelor să nu existe situații cu împărțire la zero, iar la dimensiuni mari ale sistemelor să nu existe o creștere rapidă a erorilor de rotunjire. Să-i spunem o alergare corect, dacă numitorul coeficienților de rulare (10) nu dispare și durabil, dacă ½x i ½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Teorema. Fie coeficienții a i și c i ai ecuației (7) pentru i=2,3,..., n-1 diferiți de zero și fie
½b i ½>½a i ½+½c i ½ pentru i=1, 2,..., n. (unsprezece)
Apoi măturarea definită de formulele (10), (9) este corectă și stabilă.


